I have tried the reconstruction system on the example bedroom dataset and got great/expected results. Now I’m trying it on my own dataset that was captured using realsense_recorder.py and not getting good results. The captured dataset contains over 1000 images of a small scene and appears to have no errors. For example, here is a corresponding color/depth capture:

I’m using these codes unmodified, as instructed in the O3D documentation:
python realsense_recorder.py --record_imgs
python run_system.py config/realsense.json --make --register --refine --integrate
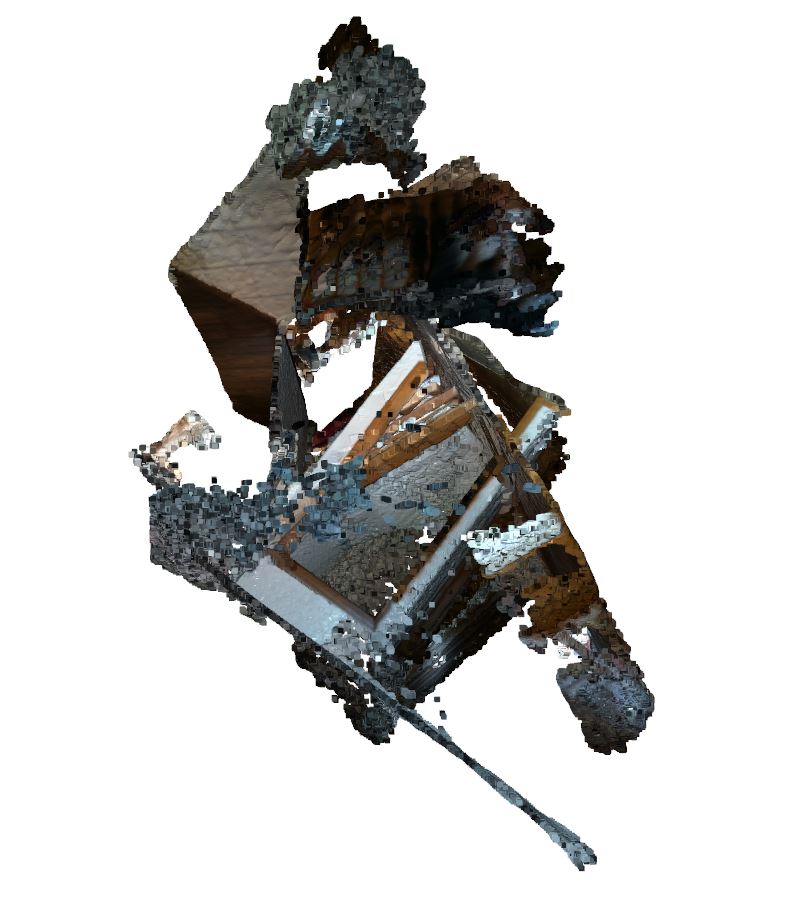
The resulting point cloud has no discernible shapes and is colorless:

any idea where error may be occuring or what I can improve? The only concern I can think of is that a lot of captures are probably redundant and might just be adding confusion. Is there a way to specify capture at a lower framerate in realsense_recorder?