
I’ve installed a realsense 435i camera on a platform and there’s a rotating platform in front of it. I want to create a 3d reconstruction system where the platform rotates and a point cloud is generated from the images/video stream taken by the depth camera then I run a mesh reconstruction algorithm
I was thinking of using open3d for this task.
here’s what it looks like
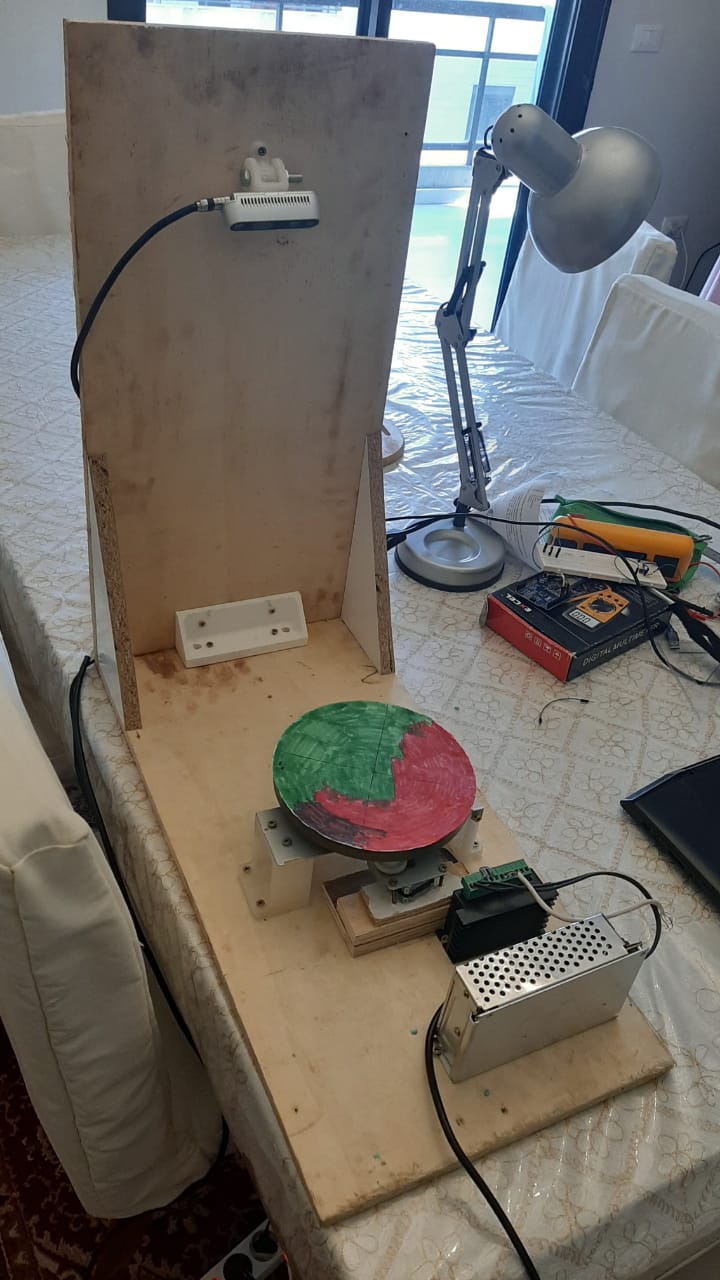
I can rotate the platform at exact degrees which is good
but my issue is with finding the center of the rotating platform
like getting the extrinsic matrix of the camera since it’s not facing directly parallel to the rotating plane
could I get some pointers or if there’s some method I could use in open3d to achieve this?
what I’ve done so far is manually finding the coordinates for the center of the rotating platform
then transforming the point cloud to get the origin of the frame of reference to align with the center, then manually rotating the point cloud so it aligns with the xyz frame of reference
however this is prone to error so I wanted to ask if there’s a better way of doing this